The Ballbot
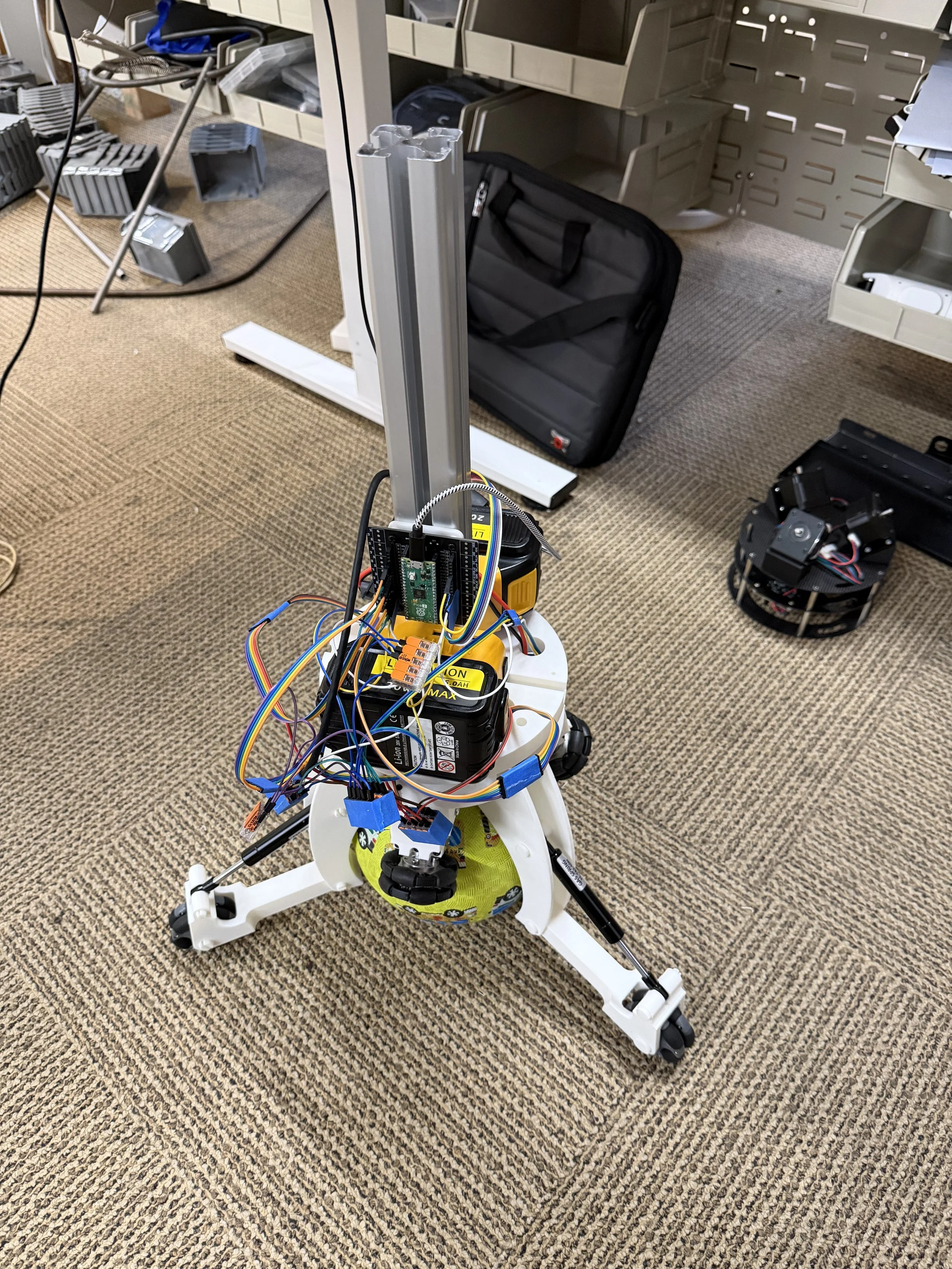
This is a robotic locomotion platform that uses 3 Omni wheels to drive a ball. This project was a prototype done in a sprint of 5 days to prove the concept of a ballbot for a robotic application.
It is controlled by a Raspberry Pico 2. It uses 3 pairs of DC motor drivers and motors from Pololu. The control algorithm is a PID controller.
I designed the entirety of the project, including both mechanical and electrical system. I figured out the kinematics during that short period of time, but it needed a bit more tuning to balance.
The balancing wheels will be removed when the robot is able to balance on its own.
Balancing kinematics
The video shows the omni wheels are driving the ball in the opposite direction of the robot’s tilt.