The Battle Bot
The Battle Bot is a graduate level mechatronics project at University of Pennsylvania. The challenge was to develop a combat vehicle that compete in a 2 vs. 2 “League of Legend” fashion.
My contribution was designing and fabricating the entire electronics system and writing the control algorithm that drives the car through waypoints using HTC VIVE localization and dead reckoning.
Vehicle Assembly
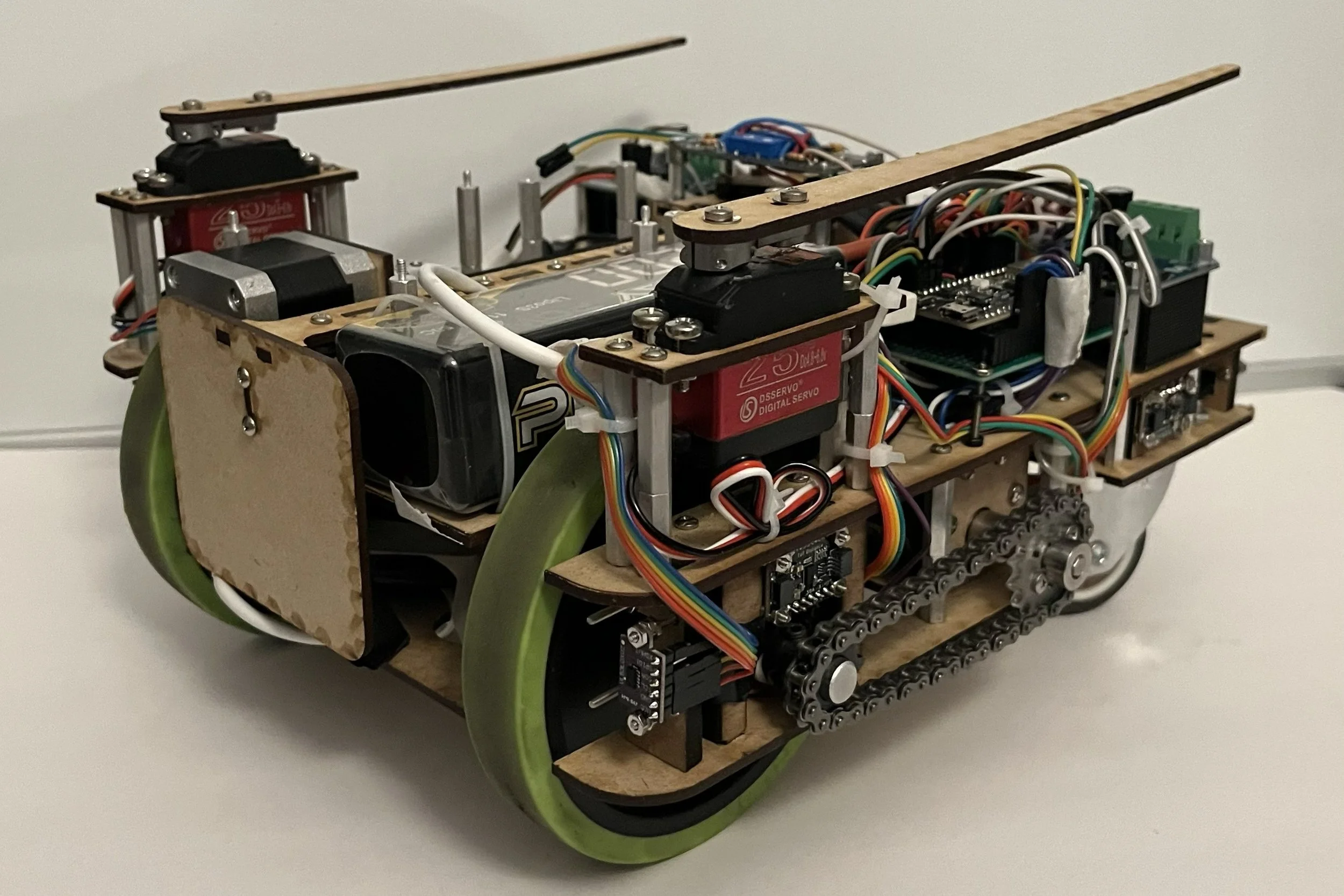
Below is the Picture of the battle bot. It uses a differential drive mechanism. The electronics system is controlled by a ESP32-S3. The vehicle is powered by 2 H-bridge motor controllers and 2 brushed DC motors. There are 2 servos driving 2 arms used for attacking other bots, and 1 stepper motor driving a lead screw to attack the enemy’s Nexus in the field.
There are 5 time-of-flight sensors used for wall-following and 2 infrared light sensors to receive the signals from the HTC VIVE unit for position and orientation detection.